Autonomous suturing via surgical robot: An algorithm for optimal selection of needle diameter, shape, and path
Summary
Needle motion planning is formulated as a nonlinear optimization problem which outputs the optimal needle size, shape, and path to meet a wide range of surgical suturing requirements.
Abstract
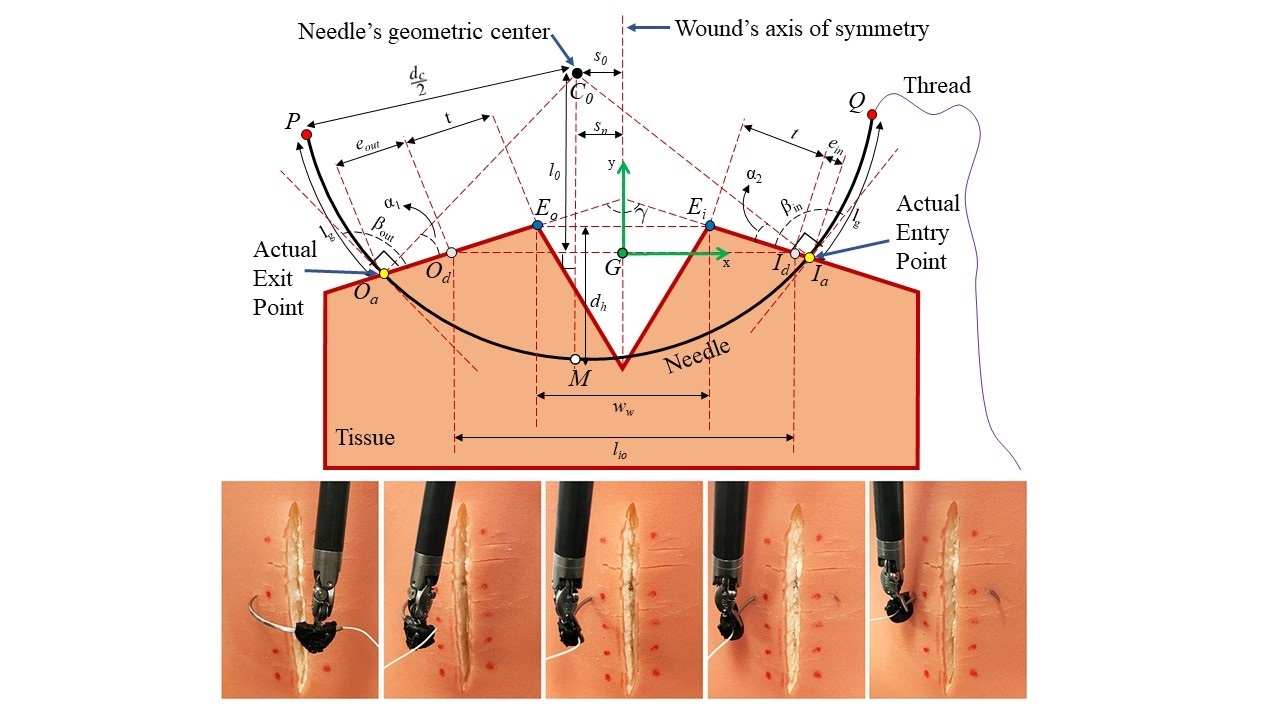
In autonomous suturing with a surgical robot, needle shape, diameter, and path are critical parameters that directly affect suture depth and tissue trauma. This paper presents an optimization-based approach to specify these parameters. Given clinical suturing guidelines, a kinematic model of needle-tissue interaction was developed to quantify suture parameters and constraints. The model was further used to formulate constant curvature needle path planning as a nonlinear optimization problem. The inputs of the optimization include the tissue geometry, surgeon defined entry/exit points, and optimization weighting factors. The outputs are the needle geometry and suggested path. Off-line simulations were used to evaluate the accuracy and performance of the proposed model, and to determine optimized needle geometry and path for several clinically relevant input sets. The output and the optimization results were confirmed experimentally with the Raven II surgical system. The proposed needle path planning algorithm guarantees minimal tissue trauma and complies with a wide range of suturing requirements.