Summary
Novel Fiber Bragg Grating (FBG)-based shape sensing unit was designed and verified for large deflection estimation of a snake-like continuum manipulator.
Abstract
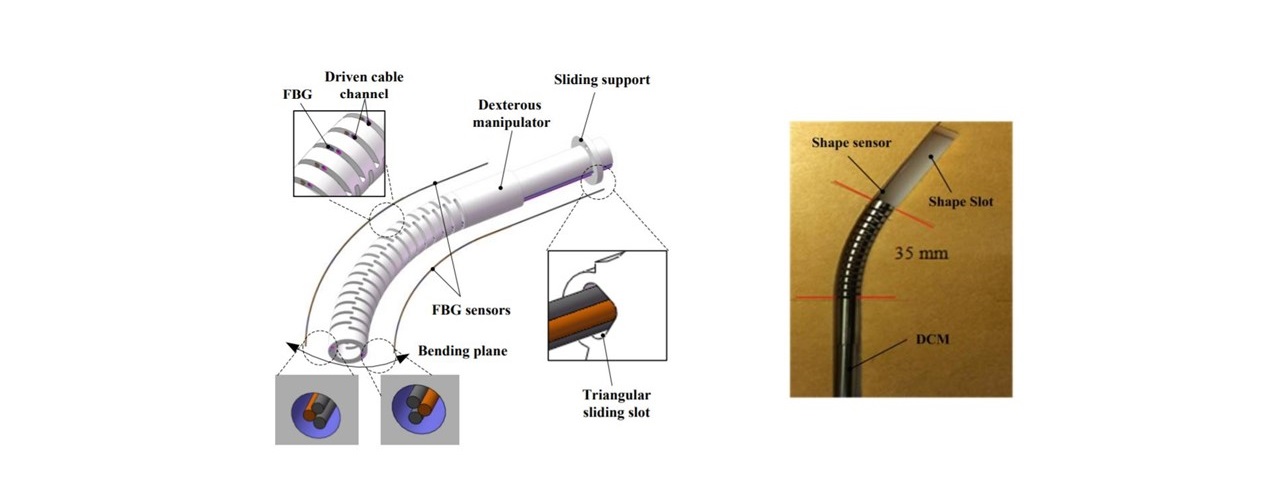
Shape sensing techniques utilizing Fiber Bragg grating (FBG) arrays can enable real-time tracking and control of dexterous continuum manipulators (DCM) used in minimally invasive surgeries. For many surgical applications, the DCM may need to operate with much larger curvatures than what current shape sensing methods can detect. This paper proposes a novel shape sensor, which can detect a radius of curvature of 15 mm for a 35 mm long DCM. For this purpose, we used FBG sensors along with nitinol wires as the supporting substrates to form a triangular cross section. For verification, we assembled the sensor inside the wall of the DCM. Experimental results indicate that the proposed sensor can detect the DCM’s curvature with an average error of 3.14%.