Compact teleoperated laparoendoscopic single‐site robotic surgical system: Kinematics, control, and operation
Summary
Develop and validate a simple, compact, low cost single site teleoperated laparoendoscopic surgical robotic system, with demonstrated capability to carry out basic surgical procedures.
Abstract
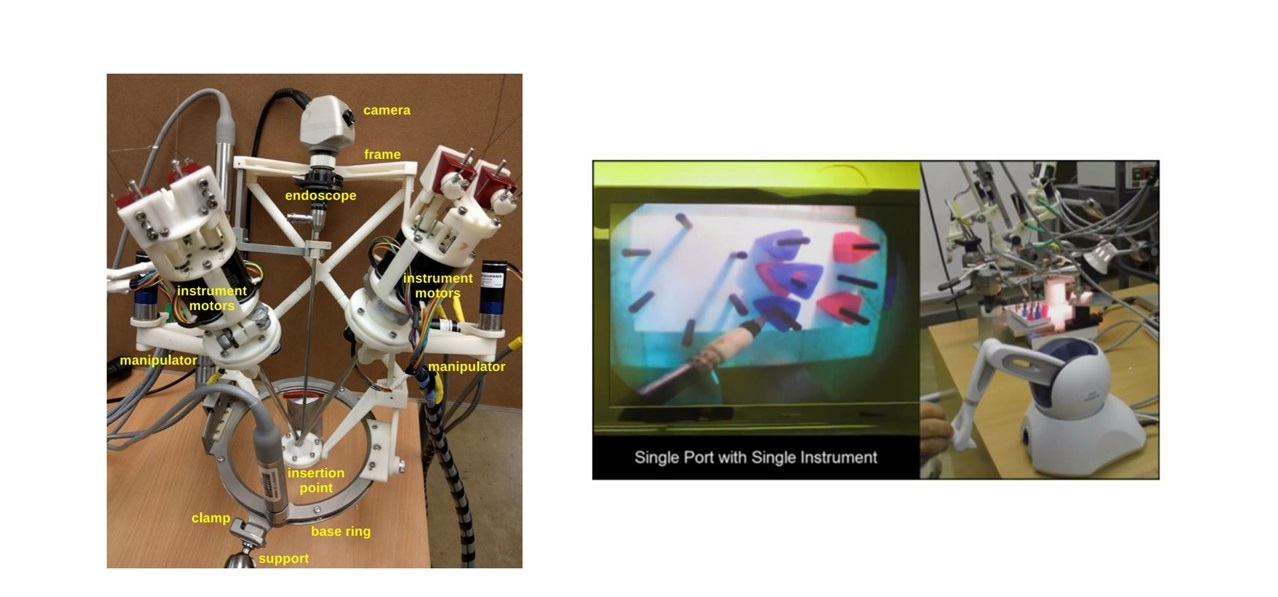
To date a variety of teleoperated surgical robotic systems have been developed to improve a surgeon’s ability to perform demanding single‐port procedures. However typical large systems are bulky, expensive, and afford limited angular motion, while smaller designs suffer complications arising from limited motion range, speed, and force generation. This work was to develop and validate a simple, compact, low cost single site teleoperated laparoendoscopic surgical robotic system, with demonstrated capability to carry out basic surgical procedures. This system builds upon previous work done at the University of Hawaii at Manoa and includes instrument and endoscope manipulators as well as compact articulated instruments designed to overcome single incision geometry complications. A robotic endoscope holder was used for the base, with an added support frame for teleoperated manipulators and instruments fabricated mostly from 3D printed parts. Kinematics and control methods were formulated for the novel manipulator configuration. Trajectory following results from an optical motion tracker and sample task performance results are presented. Results indicate that the system has successfully met the goal of basic surgical functionality while minimizing physical size, complexity, and cost.